DAS Ego 手册 (中文) v2.0
简体中文 | English
0. 文档信息
- 文档版本
- v2.0
- 最后更新
- 2026-06-04
- 适用产品
- DAS Ego 头戴式多模态数据采集设备
1. 安全与合规
1.1 安全说明
首次使用前,请仔细阅读本章并遵守所有安全指南
如需帮助,请联系:support@genrobot.ai
1.1.1 警告标志含义
- ⚠️ 危险: 可能导致严重伤害、死亡或重大财产损失.
- ⚠️ 警告: 可能导致人身伤害或设备损坏.
- ⚠️ 注意: 可能导致设备故障或数据丢失.
- 💡 提示: 有助于更好操作的建议.
1.2 责任与限制
- 请勿修改或改动设备.
- GENROBOT.AI 不对因误用、未经授权的更改或操作错误引起的问题负责.
- 使用本设备即表示您同意所有安全条款,并对其操作承担全部责任.
- 本产品不适用于 18 岁以下的用户.
1.3 集成商与用户责任
- 部署前需进行完整的威胁和风险评估.
- 根据评估结果实施适当的安全防护措施.
- 确保所有硬件和软件均已正确安装和配置.
- 未经授权不得禁用或更改安全措施.
- 遵守相关法律、标准和行业法规.
1.4 环境要求
- 工作温度:0℃~40℃(最佳 22±2℃)
- 相对湿度:40%RH~65%RH(无凝露)
- 防护等级: IP50
- 磁场强度:≤50mT
- 照度 ≤500 lux,无直射光、无反光面
- 地面无振动,远离电机 、变频器 、大功率电源、WiFi 6E/5G 基站
- 无尘、无油烟、无腐蚀性气体
1.5 使用警告
1.5.1 危险警告
- 切勿修改或篡改设备.
- 如果设备损坏或不稳定,请停止使用.
- 避免将设备长时间暴露于强磁场中.
1.5.2 操作警告
- 根据风险评估结果实施安全措施.
- 确保旁观者远离设备运动区域.
- 集成新组件或设备时重新评估风险.
- 操作前阅读所有相关设备手册.
1.5.3 维护警告
- 仅使用原装配件和替换部件.
- 定期检查设备,及早发现潜在问题.
- 遵循推荐的维护计划.
- 在符合要求的环境条件下存储设备.
1.6 数据安全与隐私
1.6.1 数据保护
- 安全处理采集的数据,因其可能包含敏感信息.
- 定期备份重要数据.
- 了解所连接云服务的数据政策.
- 遵守适用的数据保护法规.
1.6.2 隐私保护
- 在公共场合操作时尊重他人隐私.
- 进行录制或数据采集前获得必要许可.
- 遵守关于数据采集的当地法律.
2. 产品概述
2.1 核心特性
DAS(数据采集系统) 是一个通用的具身智能多模态数据采集系统.
DAS Ego 是 DAS 系列中的一款第一视角头戴式多模态数据采集设备,是ego centric数据的采集入口。Ego集成了6颗高分辨率相机、高精度IMU、麦克风音频以及多个传感器,能够提供超广视场的视觉覆盖和毫米级高精度轨迹还原,确保高质量数据采集,同时兼具多设备时空对齐等功能,适配长时间采集任务。
2.2 产品清单与规格
| 项目 | 数量 | 规格说明 |
|---|---|---|
| Ego 主机 | 1 | 269 g |
| 电池包 | 2 | 4000 mAh,3.7 V,100 g/个 |
| TF 存储卡 | 1 | 128 GB |
| 读卡器 | 1 | USB 3.0,双卡槽 |
| 充电线 | 1 | USB 转 Type-C,1 m |
2.3 设备布局介绍
| 模块 | 布局 / 规格说明 |
|---|---|
| 相机 | 6 颗约 200 万像素广角 RGB 相机;水平视场约 270°,垂直视场约 150°;录制帧率 30 Hz。 |
| 电池 | 磁吸与 DAS Ego 主机连接;单包容量 4000 mAh,约 2 小时续航;可在不关机状态下更换电池。 |
| IMU | 高精度 6 轴传感器,2×2 IMU 阵列,经标定与算法处理;陀螺仪零偏稳定性约 2.5°/h,−40°C~85°C 温漂约 0.03°/s。 |
| URDF | URDF 飞书 URDF 文档 为准。 |
2.4 设备概览


3. 核心概念
3.1 世界坐标系
- 原点:初始采集时刻 IMU 所在位置。
- Z 轴(蓝色):与重力相反,指向上方。
- X 轴(红色):初始化成功时,IMU 朝向在水平面上的前向投影。
- Y 轴(绿色):与 X、Z 正交,由右手定则确定。

3.2 局部坐标系
- 原点:IMU 几何中心。
- X 轴(红色):设备前向,即沿 IMU 安装面法线指向前方的方向。
- Y 轴(绿色):设备左侧方向,与 X 轴正交,按右手坐标系约定确定。
- Z 轴(蓝色):设备上向,与 X、Y 均正交,由右手定则唯一确定。

4. 操作指南
快速入门
登录连接配对操作
开始/结束采集操作
- 目前最新 APP 版本为 1.0.16,EGO 为 2.1.7,FINGER 为 4.5.37。
- 设备和 APP 都需要更新到最新版本后,再进行配对使用。
4.1 硬件准备
4.1.1 设备佩戴
- 所有头发必须向上固定(发带/发夹),避免头发遮挡任何镜头
- 设备镜头清洁,保持画面干净
- 设备按规定佩戴:设备平行佩戴,紧贴于眉毛;字母 logo 位于额头中间

4.1.2 开机与关机
- 短按电源键 → 听到语音提示“开机”(中文)或 “Power on”(English),电源提示灯亮绿色,即为开机
- 长按电源键 → 听到语音提示“关机”(中文)或 “Power off”(English),即为关机
语音播报语言取决于 APP 中的语言设置:简体中文 → 中文播报;English → 英文播报。


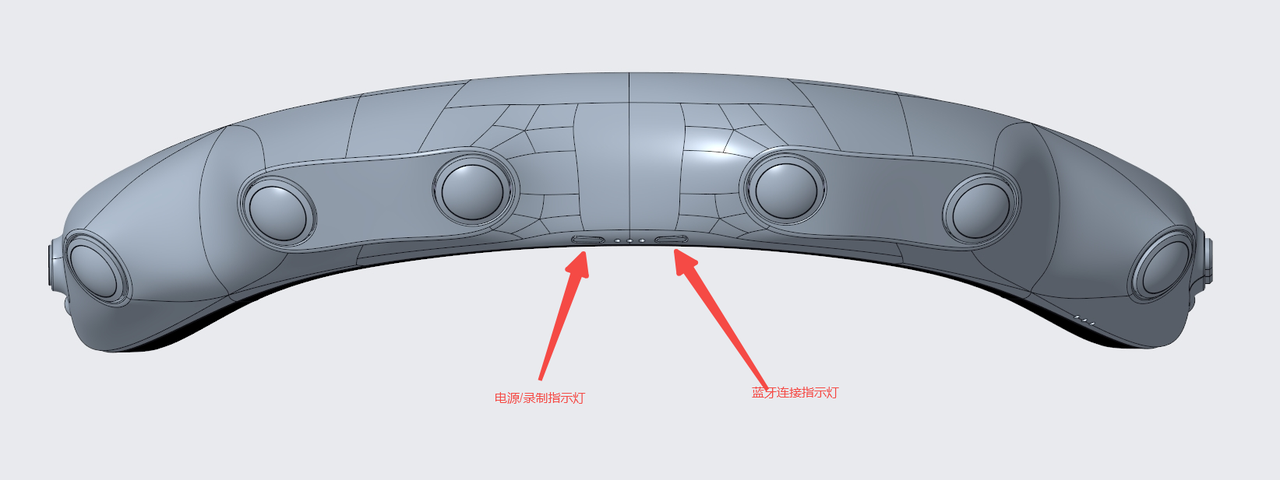
4.1.3 Ego灯语说明
| 指示灯 | 功能 | 灯语表现 |
|---|---|---|
| 电源指示灯(左) | 开机过程 | 蓝灯常亮 |
| 开机完成待机 | 蓝灯闪烁 | |
| 录制中 | 蓝灯常亮 | |
| 连接指示灯(右) | 开机过程 | 蓝灯常亮 |
| 未连接蓝牙 | 蓝灯低频闪烁(0.5Hz) | |
| 已连接蓝牙 | 蓝灯常亮 |
4.2 系统配置
4.2.1 DAS APP 介绍
本 APP 为 Ego 头戴式数采设备专属配套应用,支持 Android 与 iOS 系统,是完成数据采集、设备管理、数据上传的核心终端,助力高效、精准开展数据采集作业,操作便捷且功能全面,适配各类数采场景需求。
DAS APP 安装教程
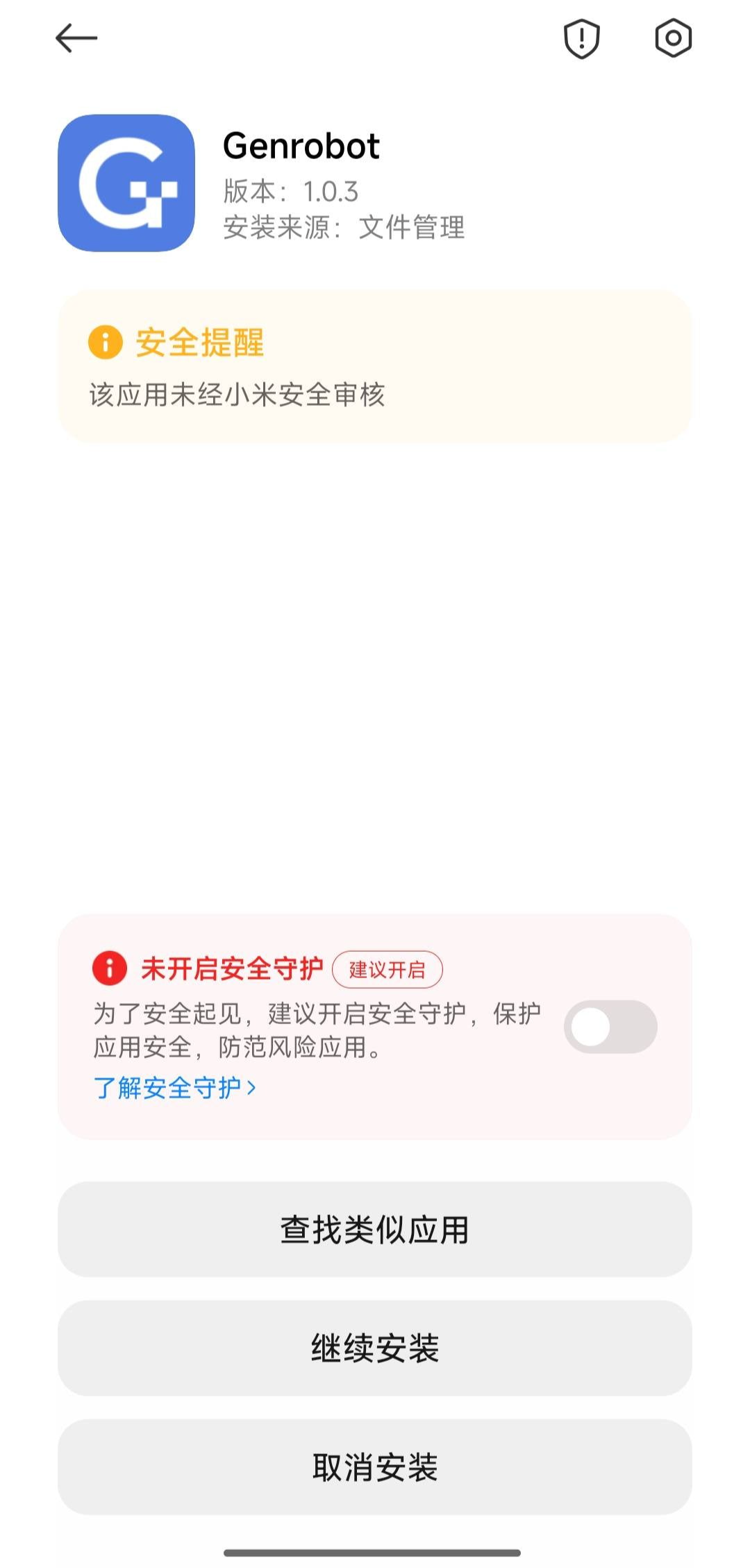
针对 Android 系统:
- 保存 apk 包于手机本地。可在版本更新文档中查找最新版本。
- 安装软件包。

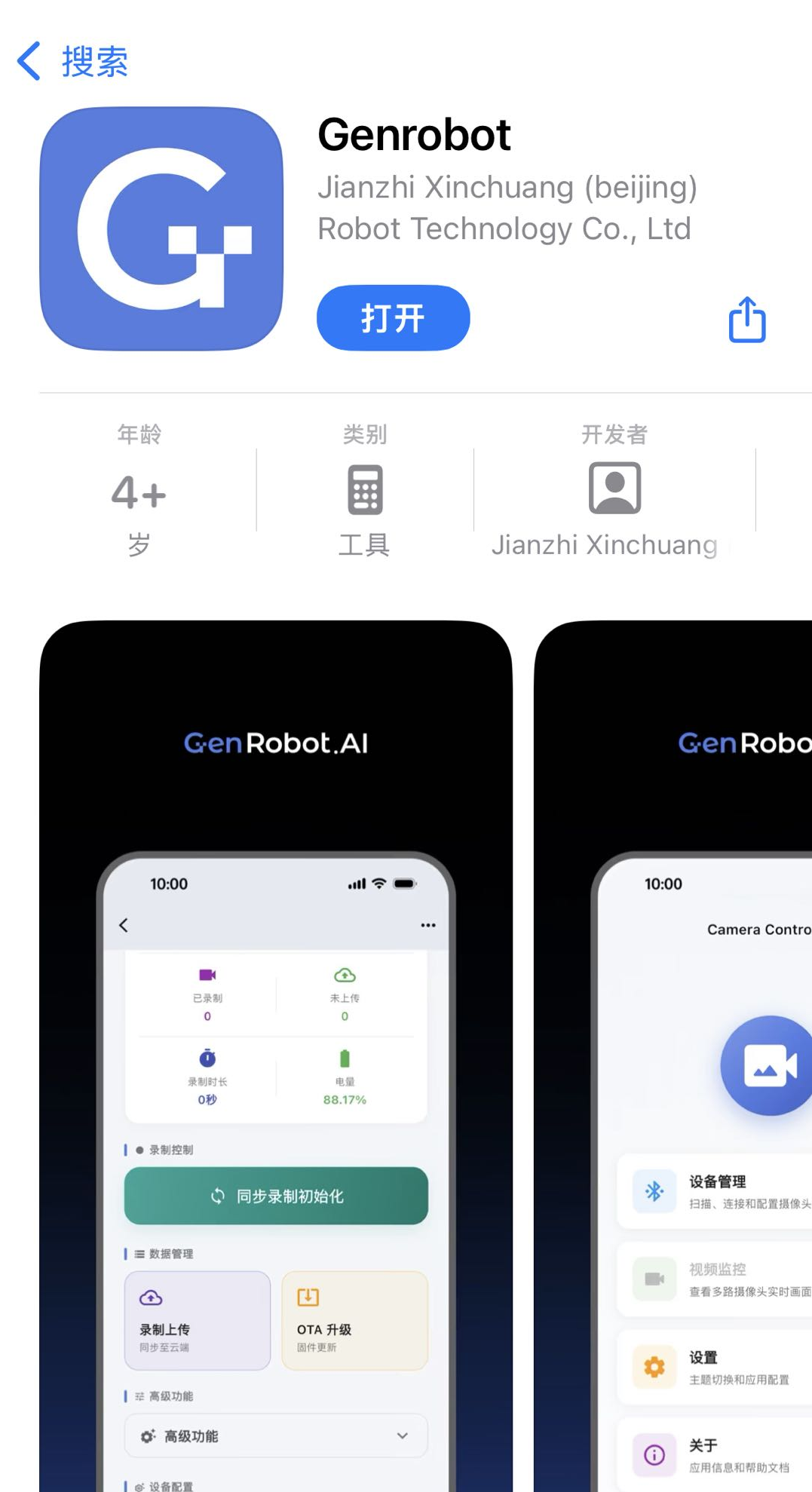
针对ios: APP Store 搜索 genrobot 下载安装
App登录(用户选择访客登录):

DAS APP 核心功能
APP连接设备操作
1. 安装好APP之后,进入APP点击设备管理

2. 设备开机状态下,点击EGO扫码按钮(点按电源键开机,长按电源键关机),将手机镜头对准EGO后面的二维码进行扫码


3. 连接成功后设备会显示在当前已连接设备列表,点击右侧按钮可进入该设备详情信息页面

4. 在设备信息-状态界面,确认蓝牙、wifi、SD卡、电量状态都正常显示

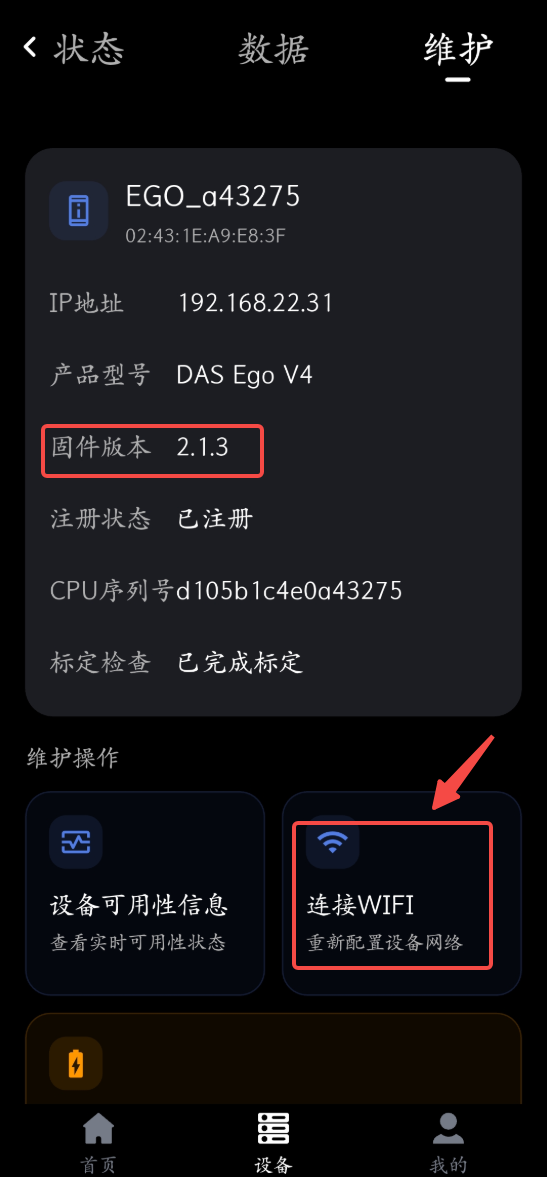
5. 在设备信息-维护界面,查看当前固件版本号,配置连接WIFI操作
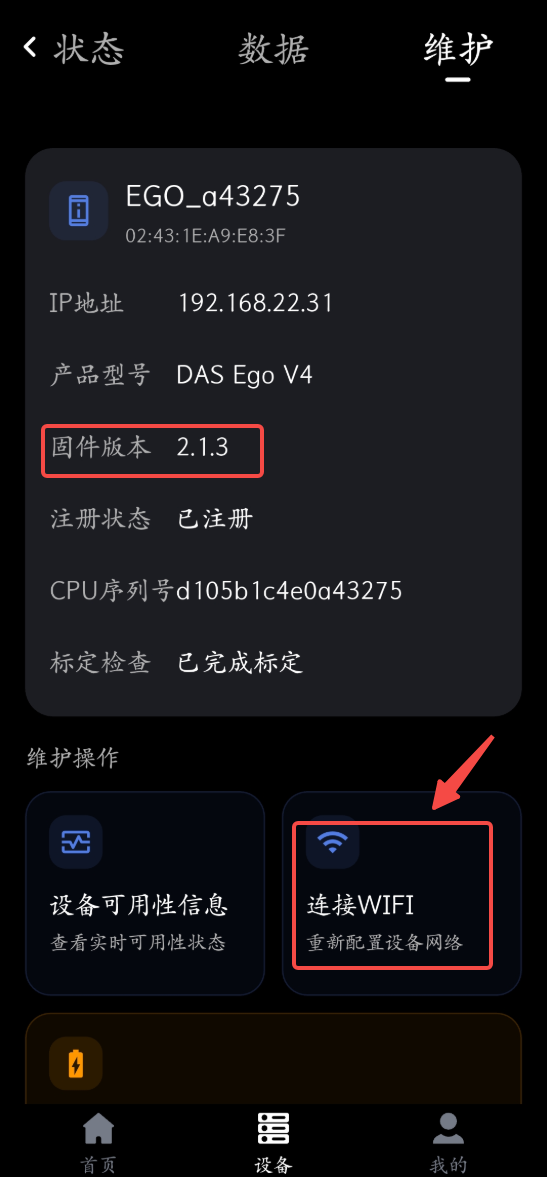
WiFi 连接操作
1. 设备已连接,点击按钮进入设备状态页面

2. 维护页面,点击连接WiFi进入WiFi连接页面
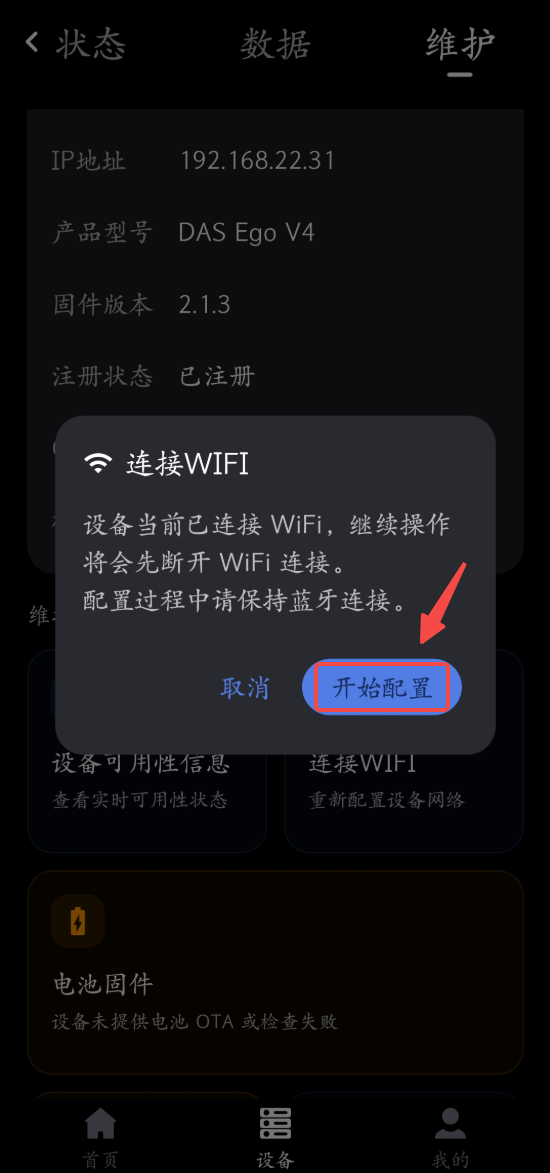
3. 点击开始配置,进入连接WiFi页面
4. 选择WiFi,输入密码,点击开始连接

固件升级操作
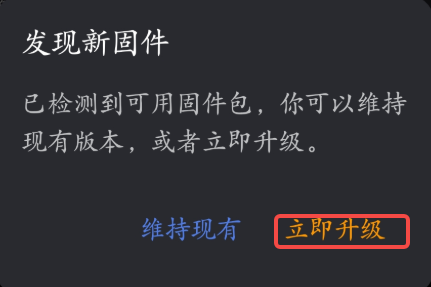
1. 连接设备后,顶部栏提示固件升级,点击下载按钮跳转升级页面

2. 点击立即升级
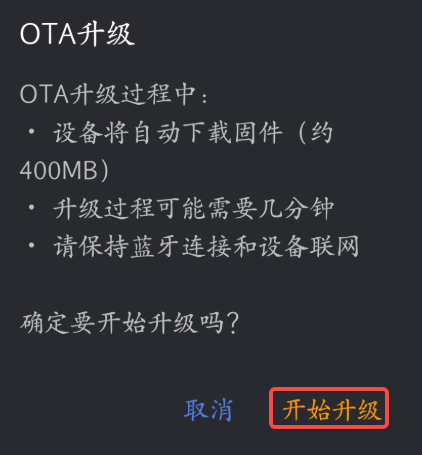
3. 等待升级完成,重启Ego设备,APP重新连接设备,连接WIFI
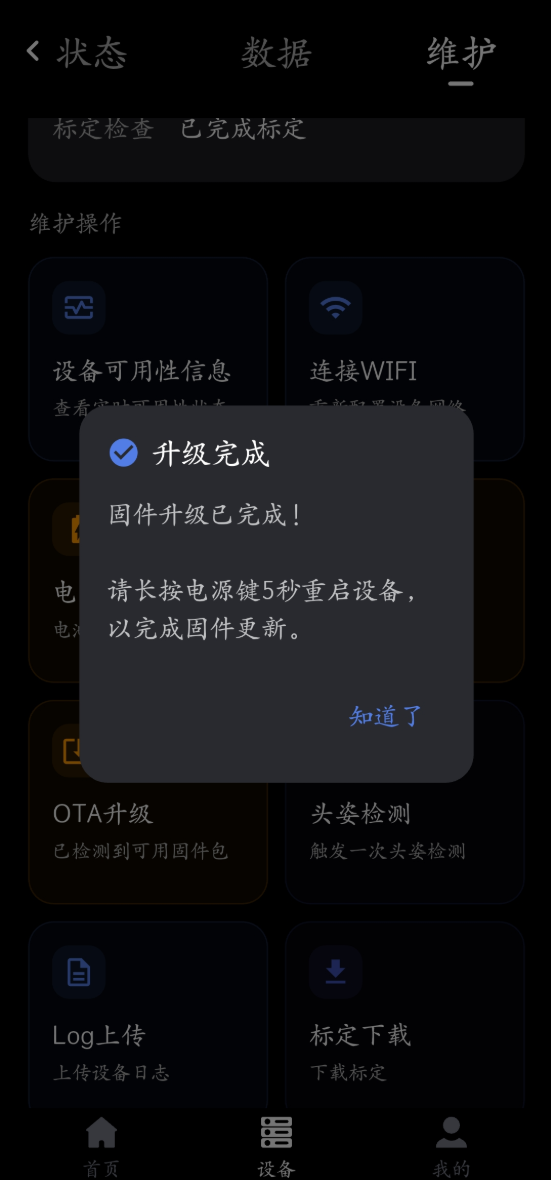
4. 固件版本显示与当前最新版本号一致,固件升级成功

其他
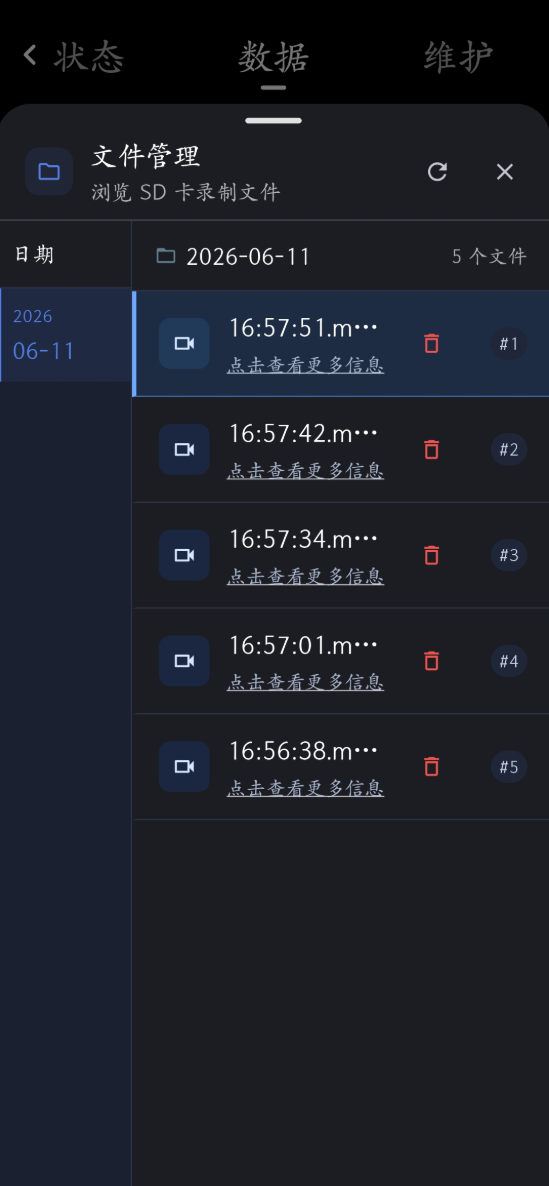
- 数据-文件管理:存放设备录制文件,可下载打开播放页查看录制画面
- 数据-SD卡格式化:当已拷贝完已录制数据或其他想清理sd卡的情况,可以对sd卡进行格式化处理
- 数据-视频播放:查看6路RTSP实时视频流(注意设备和手机需处于同一网络下,录制时不支持预览)
- 维护-Log上传:实时上传设备log到云端,便于研发定位bug
- 维护-头姿检测:佩戴设备俯仰角检测,确认设备保持水平佩戴
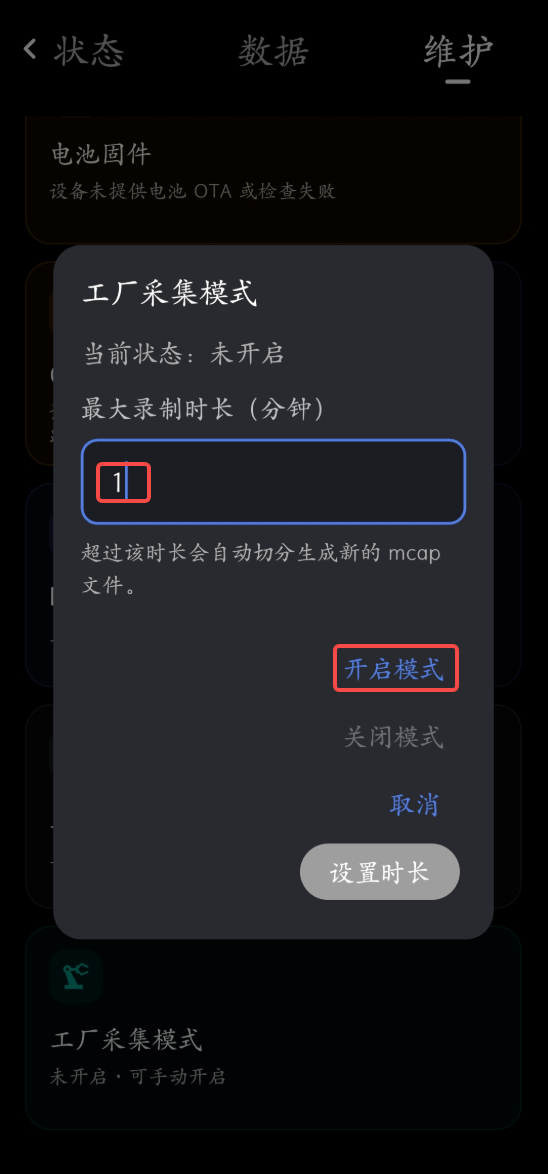
- 维护-工厂采集模式:支持持续录制时每隔一定时间自动切片与落盘
- 设备连接-一键删除:删除历史连接设备列表
- 我的:设置主题模式、语言






4.3 数据采集
4.3.1 采集数据
- 单击电源键 → 听到语音提示“开始录制”(中文)或 “Start recording”(English),表示可以正式进行采集录制
- 再次单击电源键 → 听到语音提示“录制结束”(中文)或 “End recording”(English),表示结束本次采集录制
语音播报语言取决于 APP 中的语言设置:简体中文 → 中文播报;English → 英文播报。
4.3.2 ego-finger配对
Ego、Finger 已连接后,进行 Ego 和 Finger 的配对:
- 点击 【快速配对】
- 连接成功后,APP 设备配对绿色框点亮,显示设备配对就绪,点击停止可取消配对。
1. Ego、Finger 设备都连接后,点击快速配对。

2. 配对连接中,展示“初始化中”。

3. 配对成功,展示“设备配对就绪”。

4. 配对成功,首页 Ego 连接图标蓝色点亮且显示信号,对应左右图标蓝色点亮。


4.4 数据处理
4.4.1 数据格式与存储
DAS-Ego 数据在录制后,Raw data将保存成mcap 格式,放置在SD卡中。 有关mcap 数据格式介绍,可以参考官方 https://mcap.dev/ 完整的mcap proto 格式介绍,可参考 https://github.com/genrobot-ai/das-datakit/tree/main/proto
在录制完成后,用户可取出SD卡,使用标配读卡器将数据拷贝到电脑中
4.4.2 数据可视化
使用 https://monitor.genrobot.click/#/ 可视化工具,可打开Mcap进行数据可视化
- 打开本地数据
- 打开数据后,会自动选择 Ego 数据


- 主界面介绍 参考 https://docs.genrobot.ai/zh/products/matrix-studio#_4-5-2-monitor-介绍
- 打开详情,可以看到录制结果


4.4.3 数据后处理(Docker 镜像)
镜像下载
执行以下命令拉取镜像(请将占位符替换为实际仓库地址与版本号):
docker pull 镜像仓库域名/<命名空间名称>/<OCI 制品仓库名称>:[镜像版本号]
docker pull imagepublic.genrobotai.com/genrobot/ego_slam:v0.1.80-20260522042639镜像使用
- 创建工作目录;将
init.sh、run.sh放在工作目录下,可参考下方目录结构。

- 在工作目录下创建
init.sh,内容与镜像信息保持一致(按需修改IMAGE_NAME、IMAGE_TAG):
#!/bin/bash
IMAGE_NAME="imagepublic.genrobotai.com/genrobot/ego_slam"
IMAGE_TAG="v0.1.80-20260522042639"
VIO_VERSION="${IMAGE_TAG}"
echo "============================================"
echo "检查镜像: ${IMAGE_NAME}:${IMAGE_TAG}"
echo "- VIO 版本: ${VIO_VERSION}"
echo "============================================"
docker pull ${IMAGE_NAME}:${IMAGE_TAG}
if [ $? -eq 0 ]; then
echo "============================================"
echo "镜像可用: ${IMAGE_NAME}:${IMAGE_TAG}"
echo ""
echo "使用方式:"
echo " ./run.sh"
echo "============================================"
else
echo "镜像获取失败"
exit 1
fi- 在工作目录下创建
run.sh,用于启动容器(IMAGE_NAME、IMAGE_TAG与上一步一致):
#!/bin/bash
IMAGE_NAME="imagepublic.genrobotai.com/genrobot/ego_slam"
IMAGE_TAG="v0.1.80-20260522042639"
CONTAINER_NAME="ego-slam-container"
# 版本号
VIO_VERSION="${IMAGE_TAG}"
# 允许 Docker 访问 X11 显示
xhost +local:docker 2>/dev/null
docker run -it --rm \
--name ${CONTAINER_NAME} \
--privileged \
-e DISPLAY=${DISPLAY} \
-e VIO_VERSION="${VIO_VERSION}" \
-v /tmp/.X11-unix:/tmp/.X11-unix:rw \
-v /dev:/dev \
-v $(pwd)/data:/app/data \
${IMAGE_NAME}:${IMAGE_TAG}为脚本添加可执行权限:
chmod +x init.sh run.sh。在工作目录下创建
data文件夹。将待处理的
mcap拷贝到data目录下。执行
./init.sh检查并拉取镜像。执行
./run.sh进入容器(脚本会挂载本机 X11 与data目录)。运行成功示意如下:

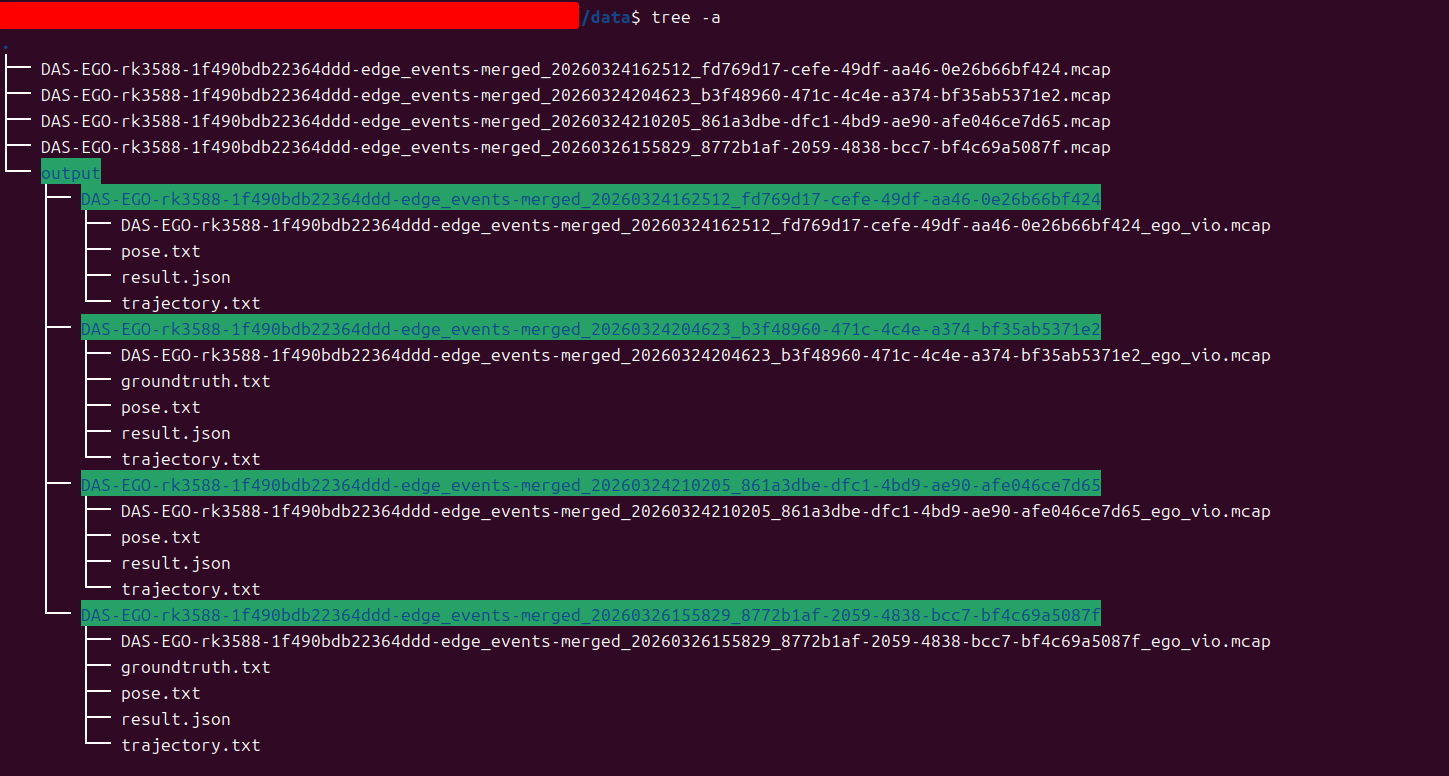
4.4.4 pipeline.sh(仅 Ego SLAM)
批量(-i)
对目录下全部 mcap 处理,仅运行 Ego SLAM。
/app/scripts/pipeline.sh -i /app/data/ --output-dir /app/data/output/

单个 mcap(--input-dir)
data 中只能包含一个 mcap;若存在多个,请改用 -i。
/app/scripts/pipeline.sh --input-dir /app/data/ --output-dir /app/data/output/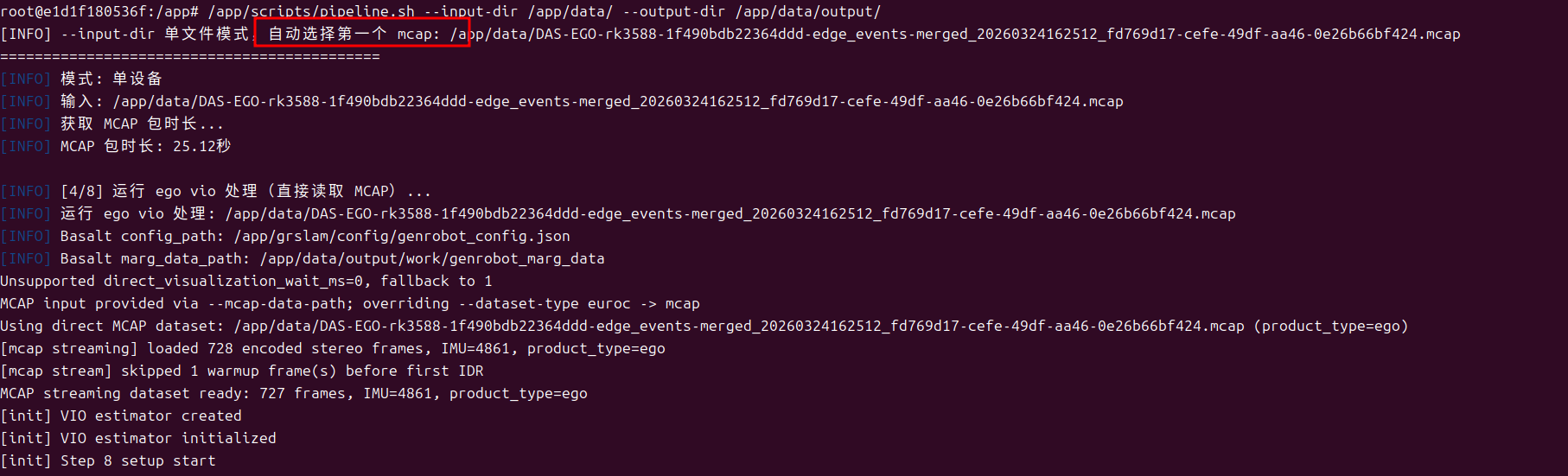

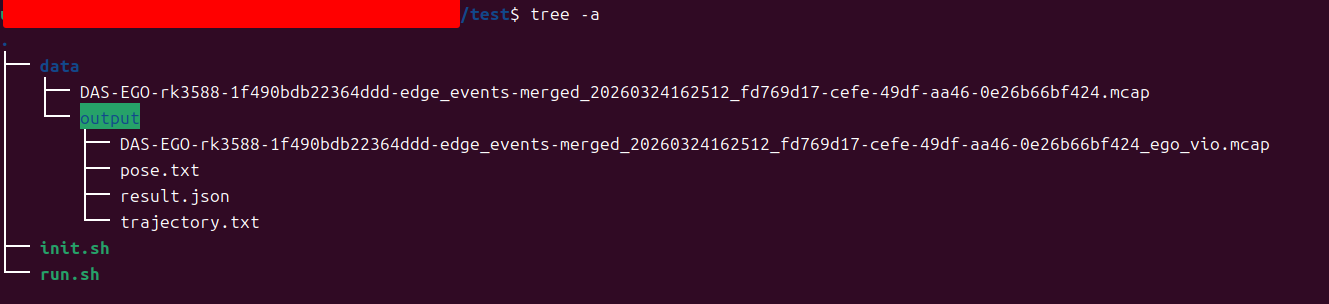
处理完成后,结果均在 --output-dir 指定目录。
4.4.5 pipeline_checker.sh(Ego SLAM + checker)
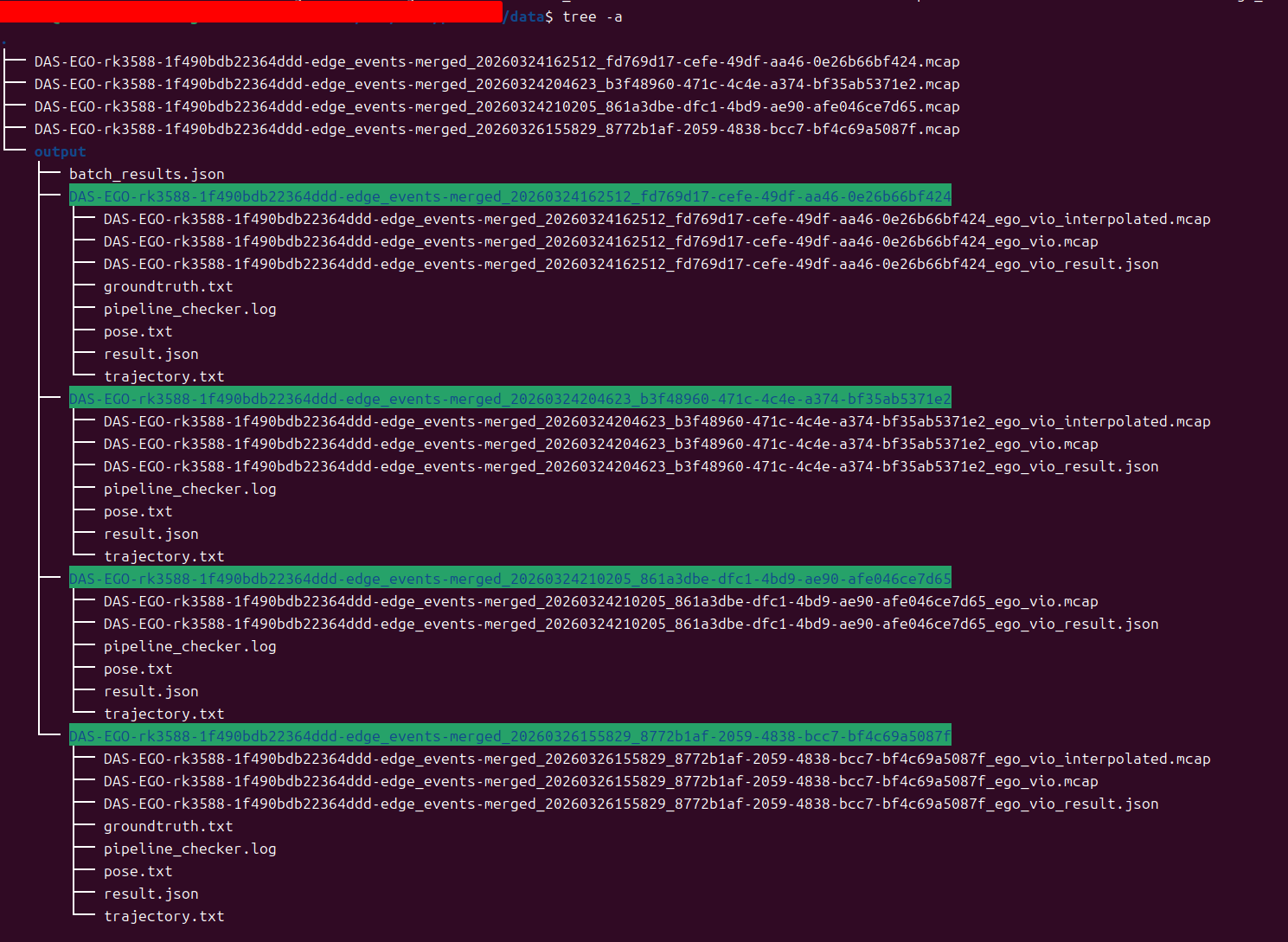
批量(-i)
/app/scripts/pipeline_checker.sh -i /app/data/ --output-dir /app/data/output/
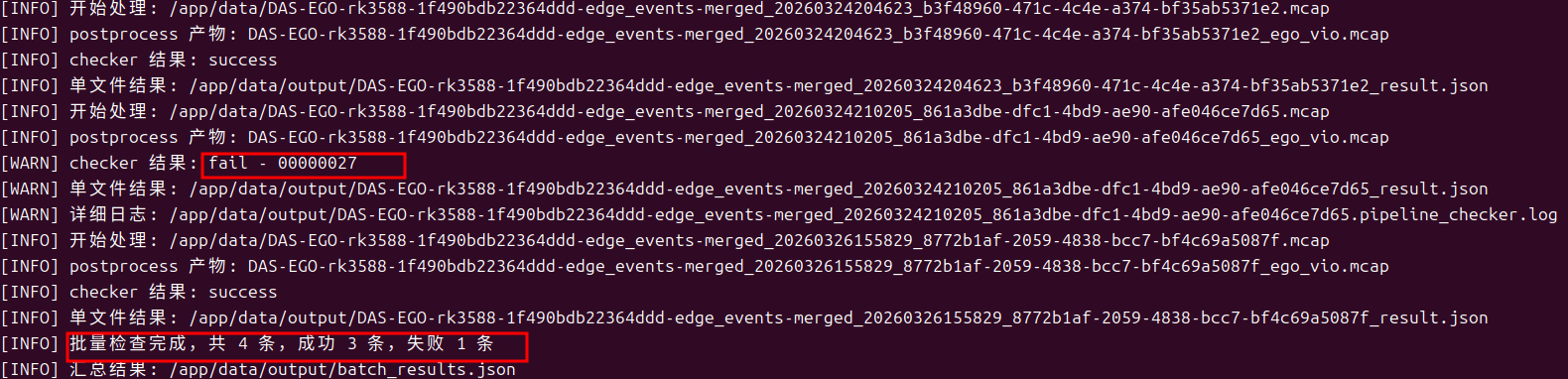
若出现 00000027 等 checker 报错,可对照下方「Error Test」说明排查
单个目录(--input-dir)
目录内可放多个 mcap,但仅处理第一个有效文件。
/app/scripts/pipeline_checker.sh --input-dir /app/data/ --output-dir /app/data/output/
正确运行时,vio 轨迹会写入生成的 mcap,checker 会对输出 mcap 做检测。
Error Test
| errorcode(Status) | 检查项 | 参数配置 | 说明 | 优先级别 | 备注 |
|---|---|---|---|---|---|
| 00000000 | 总体成功 | -Success | 所有已启用检查均通过 | - | 启用 |
| 00000023 | 轨迹长度检测 | -t, --tracker-threshold 10cm | 轨迹长度未大于阈值 | P0 | 启用 |
| 00000024 | 轨迹坐标范围检测 | -e, --eef-pose-threshold | 轨迹坐标范围大于阈值 | - | 未启用 |
| 00000025 | 轨迹掉帧检测 | -s, 掉帧阈值相关配置 | 轨迹掉帧超过阈值 | P0 | 启用 |
| 00000027 | 轨迹平滑性检测 | -j, --jerk | 轨迹平滑性检测未通过 | P0 | 启用 |
| 00000031 | 输入文件合法性检查 | 输入文件路径 / 文件格式 / 文件内容 | 输入文件错误 | P1 | 启用 |
| 00000032 | 配置有效性检查 | 各检查开关配置 | 未启用任何检查 | P1 | 启用 |
| 00000033 | 运行时异常检查 | 程序内部处理逻辑 | 处理过程异常 | P1 | 启用 |
4.4.6 结果可视化
https://monitor.genrobot.click/#/index。在可视化页面中加载生成的 mcap,即可查看相关内容。
5. 技术参考
5.1 Topic 列表
主要topic介绍:
| Topic | Description | Frequency |
|---|---|---|
/robot0/sensor/camera0/compressed | cam0 image stream H.264 encoder | 30 Hz |
/robot0/sensor/camera1/compressed | cam1 cam image stream H.264 encoder | 30 Hz |
/robot0/sensor/camera2/compressed | cam2 image stream H.264 encoder | 30 Hz |
/robot0/sensor/camera3/compressed | cam3 image stream H.264 encoder | 30 Hz |
/robot0/sensor/camera4/compressed | cam4 image stream H.264 encoder | 30 Hz |
/robot0/sensor/camera5/compressed | cam5 image stream H.264 encoder | 30 Hz |
/robot0/sensor/imu | IMU info | 200 Hz |
/robot0/vio/eef_pose | vio eef pose | 30 Hz |
/robot0/vio/relative_eef_pose | relative vio eef pose | 30 Hz |
/robot0/sim/robot_info | urdf robot info: eef pose,joints | 30 Hz |
/robot0/sensor/camera0/camera_info | calibration info | 1 Frame |
/robot0/sensor/camera1/camera_info | calibration info | 1 Frame |
/robot0/sensor/camera2/camera_info | calibration info | 1 Frame |
/robot0/sensor/camera3/camera_info | calibration info | 1 Frame |
/robot0/sensor/camera4/camera_info | calibration info | 1 Frame |
/robot0/sensor/camera5/camera_info | calibration info | 1 Frame |
其中
camera0 - camera5的分布按Ego俯视图从左到右排列; /robot0/vio/eef_pose topic 记录了在世界坐标系下,DAS-Ego 的pose,如下图Tilted state
/robot0/vio/relative_eef_pose topic 中,记录了以0时刻的das-ego 姿态作为世界坐标系零点,后续pose相对0时刻的变化,如下图Aligned state

6. 故障排查与维护
6.1 常见语音提示
- 当设备电量不足时会听到语音提示词 Low battery,表示需要进行电池更换
- 当没有插入sd卡时,无法开始录制,会以 No sdcard 作为提示
6.2 已知限制
不支持录制中换电池,否则可能造成数据损坏。
目前的SD卡格式是FAT32,不支持超过4G的单数据录制。如果需要超过20min的数据录制,需要用附带软件(DiskGenius),将SD卡转化为exFAT格式。